2023-06-08 20:31:31 发布
发布
没有把多余的精力和研发能力投入到增程产品线的继续扩展(也就是 L6)上,让理想汽车有时间去搞些别的东西。于是在上海车展上,我们看到理想拿出了自己的 800V 高压纯电平台,顺手又做了 480kW / 240kW 的大倍率自营快充设备。对理想来说,这算是重要而不那么紧急的事项。

那么重要且紧急的事情呢?当然有。李想本人在年初的公开信里说,希望理想汽车到 2030 年成为领先的人工智能企业。2023 年,这个“领先”有了一个具体指标——实现城市场景的导航辅助驾驶。并且和高速场景不一样,几位头部甚至非头部玩家,都在差不多同一时段落地,竞争肯定是更激烈的。

理想也选择在今年推送他们的城市 NOA 功能,年底覆盖 100 座城市。一个决心要做人工智能先锋的家用车专家,他们与友商所做的产品,有什么相似与不同?技术路线的趋同演化下,理想汽车的优势又在哪里呢?

我们与理想智能驾驶部门两位负责人——副总裁郎咸朋博士与产品负责人赵哲伦“班长”的对话就基于这些问题展开。说简单吧,这些问题的确不复杂,我们从底层到应用一点点来看。
网络模型 BEV,无图迭代 GPT……
从底层原理而言,理想汽车与大部分友商一样,都通过大家已经有所耳闻的一系列工具来感知、判断这个世界。BEV 和 Occupancy,是我们最先遇到的名词。前者的意思是“鸟瞰图”,也就是用车辆的各种传感器精准感知周边环境,并生成一个“上帝视角”的环境模拟;而 Occupancy 也就是“占用网络”,则是将这个环境模拟进一步精细化,让车辆判断出障碍物和可通行路面的区别,为“感知-决策-执行”的第二步提供数据。对理想而言,这些属于人工智能三要素——算法、算力、数据,当中的算法。

传统意义上的高精地图,属于 BEV 中的“静态 BEV”元素,包括道路结构和标线;与之相对的,“动态 BEV”则是运动中的车辆、行人等等。基于高精地图采集的成本、新鲜度以及车载算法发展的情况,理想和其它头部厂商一样,选择让车辆自己建构静态、动态 BEV 模型,让智能驾驶对导航的需求程度降低到导航地图+一丁点智能驾驶元素的水平:只需要知道去哪儿怎么走,而不用知道“在 XX 经纬度的地点设法向左并线”。
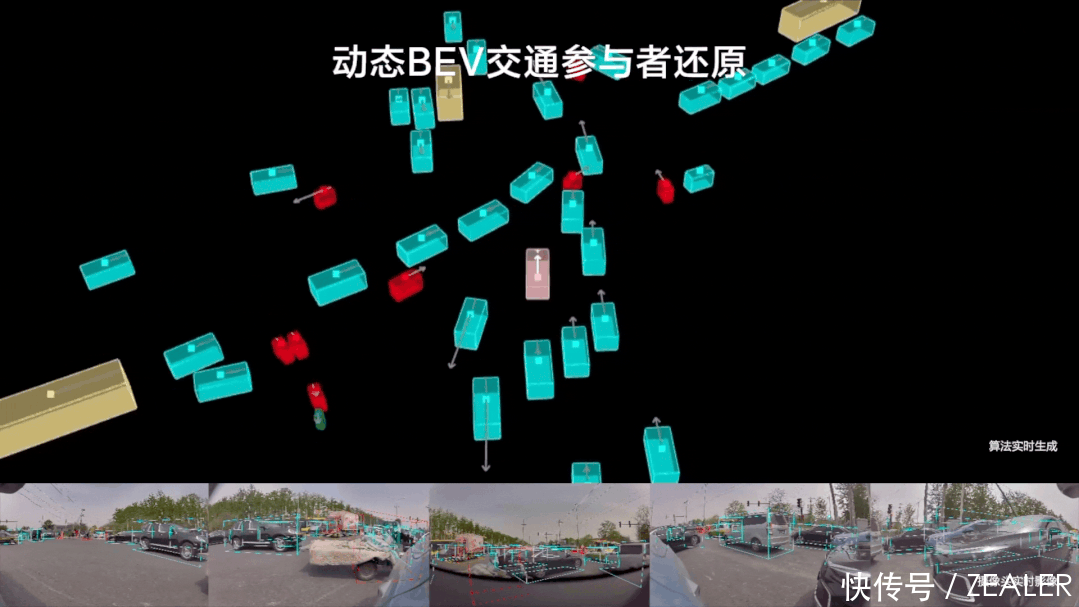
至于其它可能影响驾驶的非标准物体,理想通过 Occupancy 网络,将世界还原成一个类似 Minecraft 一样充满方块的区域,车辆就在其中判断哪些是障碍物需要刹车、哪些是可以通行的路面,哪些地方要让“魔毯”悬架软一点。

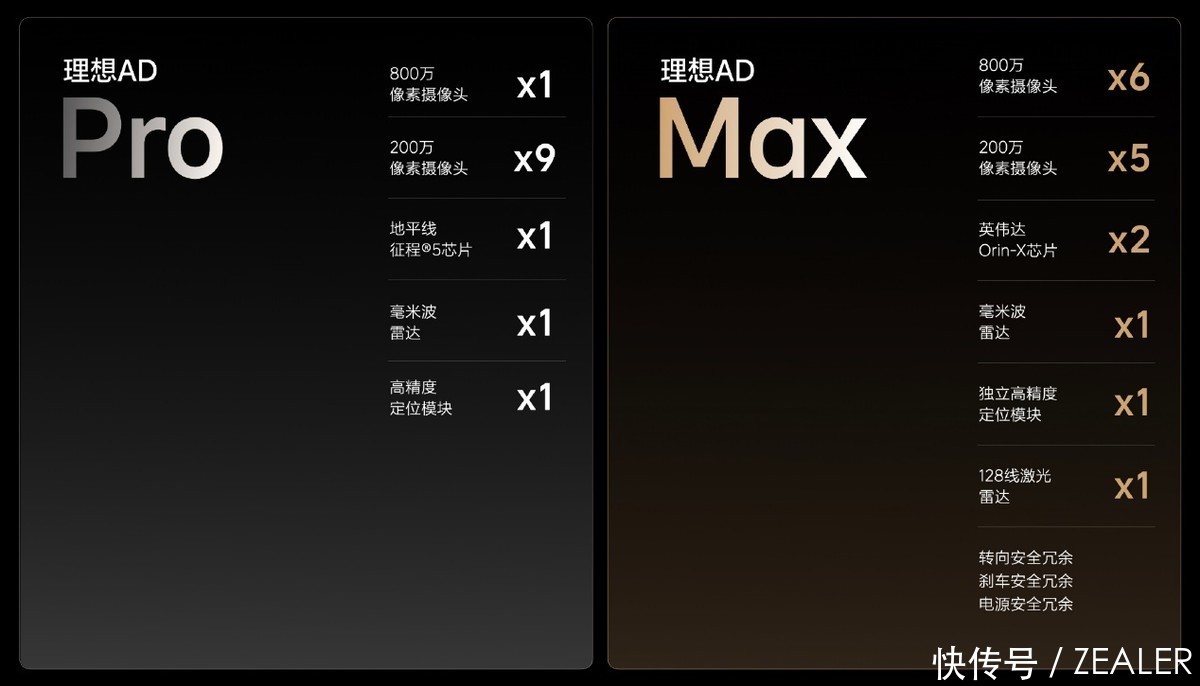
这几个模型要跑起来,算力是必要的前提。因此,我们接下来可能会遇到“可视化界面上能看到,系统却不能对物体做出反应”的情况。基于算力区别,理想的城市 NOA 将只会出现在配备两个英伟达 Orin 芯片的 AD Max 版上。不过,接下来理想也会尝试将 Max 的一些运算模型迁移到 Pro 版,尽量让它们共享同一个智能驾驶技术栈,比如今年,他们就会使用 BEV 感知架构重写高速 NOA 与 LCC 功能。
还记得人工智能三要素吗?郎咸朋博士认为,大家在算法、算力方面的区别其实不大,真正拉开差距的地方是数据。数据如何获得?获得后的训练迭代又怎么做?这就是理想的优势领域。

理想收集智能驾驶数据的历史可以追溯到理想 One 时代,第一条算法的训练视频拍摄于 2019 年。到 2021 款理想 One 投产,理想进入了 AD1.0 时代,他们收集了多达 1 亿公里有代表性的数据。按照“标配智驾硬件 x 总销量”的数据公式,理想 One 上标配的智能驾驶硬件和总计超过 20 万辆的销量,为 AD2.0 的理想打好了数据量的基础。到今天,理想已经有了 4 亿公里的可用算法训练里程。
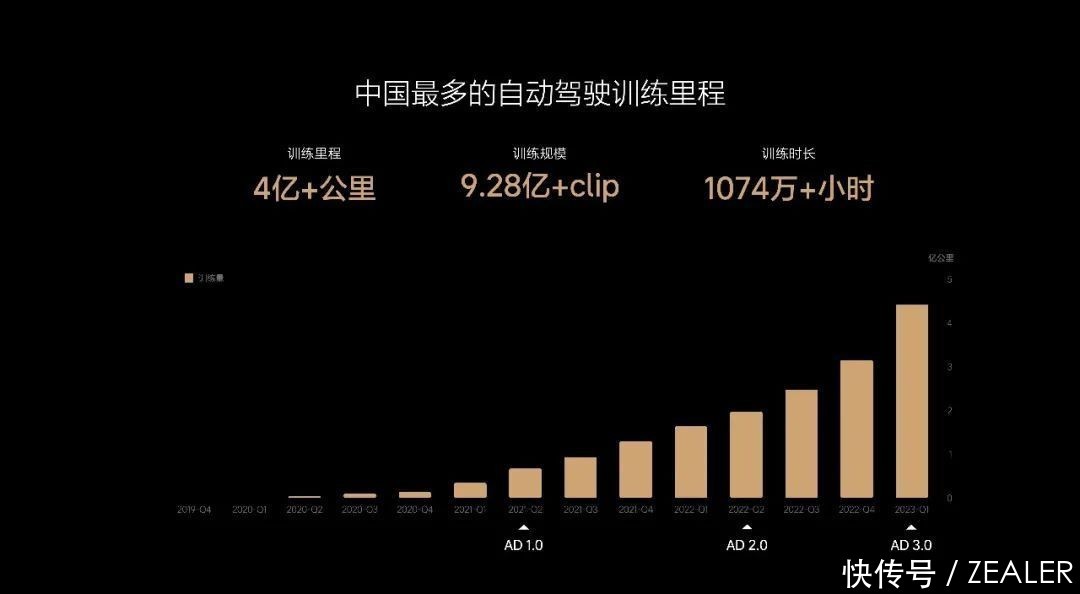
收集回来的数据反哺给算法。理想除了上路实测外,也储备了大量高算力芯片,建立了自己的大型超算中心,让算法在仿真环境中快速打怪积累经验。这种“经验积累”有点像今天的 ChatGPT,先通过大量弱关联、粗略标注的样本获取基础能力,再通过个别精密标注的数据(个别智能驾驶中的长尾问题、突发问题)完善城市 NOA 的能力。这比我们曾经认为的机械化题海战术有效得多,车可以真正像人一样去思考道路与轨迹。
作为用户的我们会发现什么?
应用层的事情相对简单、直观。我们主要会体验到一套城市导航辅助驾驶好不好用,要求人类接管的频率如何,能用这套系统的范围有多大,当然还有最重要的费用问题。理想的两位智能驾驶专家也给我们提供了消息。
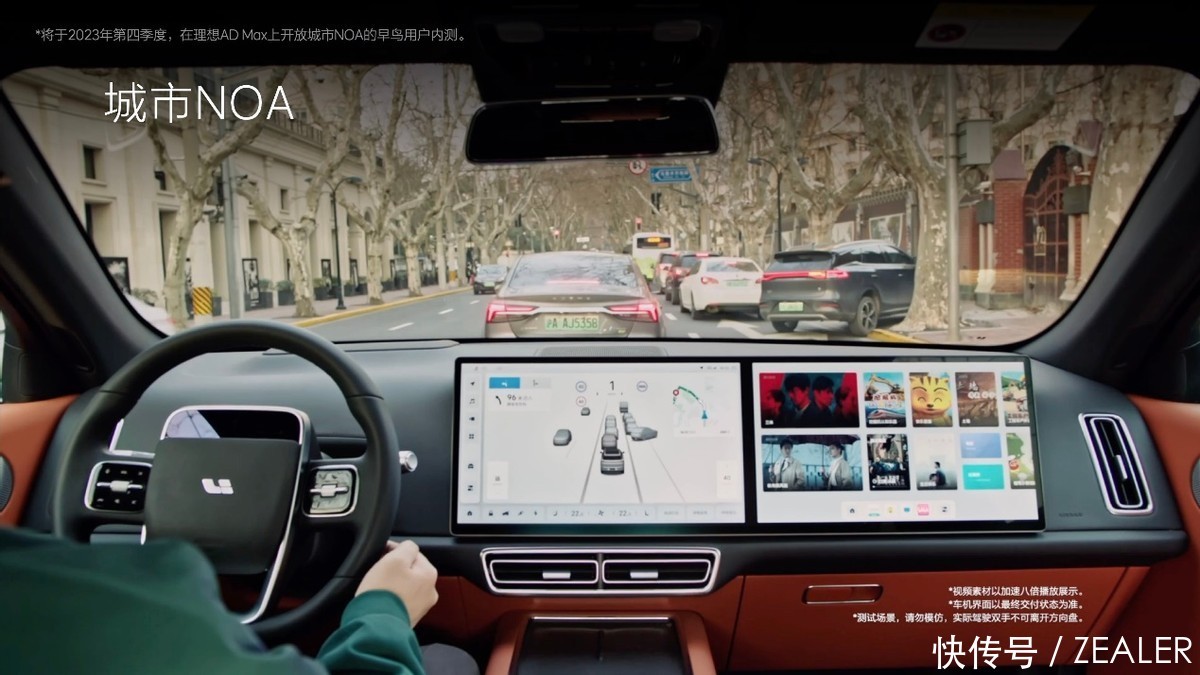
理想把人工接管划分成体验和安全两种。基于用户对系统能力边界的认识,“体验接管”没有特别的要求,但“安全接管”则要求尽量减少。综合来看,根据理想汽车的测试数据,当前版本的城市 NOA 基本可以做到 20-30km 接管一次,接下来的目标则以时间划分,从每天一次再到每周一次。理想认为,这样的频率已经能让我们很放心地使用城市 NOA 功能。为了缓解“体验接管”带来的不悦,理想还会强化车辆可视化界面,让驾驶者知道系统能干什么、将要干什么。

至于城市 NOA 的使用范围,理想汽车也是根据保有量、训练数量确定的。理想汽车保有量大、车主行驶次数多的路段和城市,开放城市 NOA 的时机就更早。每一辆配备 AD Max 的理想,就是一台“高精地图测绘车”、一辆“智驾算法训练车”。

数据在理想智能驾驶的迅速崛起中扮演着重要角色,因此理想也将智能驾驶作为一项产品而不是服务出售,让数据和算法在用户卖车时成为车辆资产和残值的一部分。基于这个理由,理想目前选择将城市 NOA 免费配送给 AD Max 的用户。他们希望这样能让用户车辆更保值,也更愿意选择 AD Max,加入到智驾数据的闭环中。
乍一看,在攻下城市导航辅助驾驶这个智能堡垒的路上,理想从感知硬件、计算芯片,到底层模型、感知融合架构、去高精地图的趋势,似乎和友商处于“高水平趋同”的局面。然而当我们再观察理想智能驾驶的一些细节,比如硬件预埋、数据收集、算法迭代甚至最后的商业模式就会发现,理想正以自己数量和里程的优势,构筑自己在智能驾驶数据上的壁垒。
数据=数量 x 时间,而时间不可逆转。基于这个理由,一些人认为未来的汽车世界将是那些先发玩家的天下,后人永无追上的可能。这种看法有些激进却不无道理。或许接下来,每一位在智能驾驶领域有所建树的主机厂玩家,都会或多或少地带上点理想的影子。




 首页
首页